A flightboard é o centro de processamento do quadcopter e como tal, tem que por um lado receber e processar as ordens vindas do comando através do receptor e pelo outro lado controlar os quatro motores através do ESC.
Primeiro tratamos de interligar o receptor e a flightboard, usando os canais do receptor, que por usar a nomenclatura clássica dos aviões de aeromodelismo, tem os nomes aileron, elevator, rudder e throttle, e que correspondem aos já nossos conhecidos roll, pitch, yaw e throttle.
Os nomes clássicos referem-se às superfícies de controlo de um avião, que acabaram por se tornar a norma. Na realidade, tirando o throttle, os outros três controles referem-se a rotações sobre os três eixos X, Y e Z.
No vídeo sobre o Controlo de Atitude explicamos em mais detalhe a teoria.
Tanto as ligações do receptor como a ligação da flightboard ao ESC deve seguir o esquema proposto pelo MultiWii.
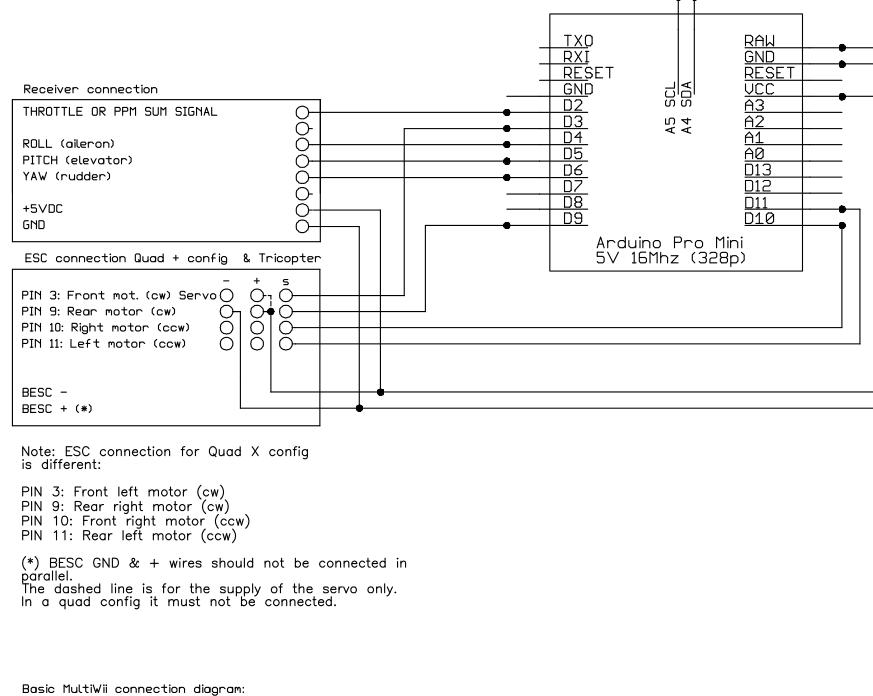
A partir deste esquema elaborámos um resumo simplificado de todas as ligações de forma a simplificar a tarefa, no entanto não é suficiente para que não nos enganemos, como poderão ver no vídeo.
O QBrain tem as informações de ligação no topo, tal como podem ver nesta imagem. Iremos usar essas informações para ligar os vários canais aos motores, tendo em conta a posição que o QBrain tem na nossa frame.
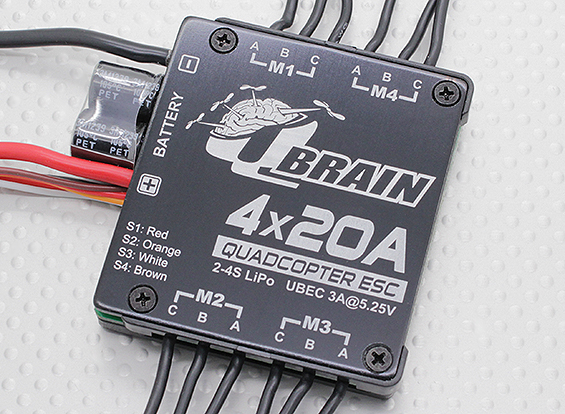
Outra das características do QBrain é conter um UBEC de 3A, que não é mais do que um regulador de tensão que transforma os 11.1V da bateria em 5V, de forma a dispensar o uso de uma bateria externa.
Links para sites e artigos relevantes:
E não se esqueçam, sempre que se sintam um pouco perdidos podem sempre recorrer ao Glossário de termos técnicos usados ao longo de toda a série!
 Resumo da série 1
Resumo da série 1